SMART DUSTBIN
Introduction
It is a DIY smart dustbin using Arduino, ultrasonic sensor, and a servo motor. After the recent covid-19 era, people are trying to adopt a more contact-less approach. Our smart dustbin uses one such approach.
Components
Before you start building your Arduino-based drone, make sure you have the following components:
Arduino UNO
Ultrasonic sensor HC-SR04
SG-90 micro servo motor
Dustbin
Jumper wires
Battery
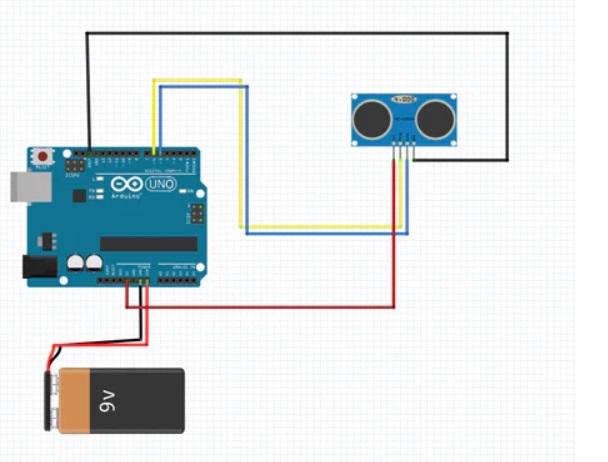
Circuit diagram
Working
The smart dustbin utilizes an Ultrasonic sensor HC-SR04 for object detection in its proximity. Once an object is detected, the sensor sends a signal to the Arduino Uno. The Arduino processes this signal and subsequently sends a command to the Servomotor to open the top flap of the dustbin.
To customize the duration for which the flap remains open, you can easily adjust the code within the Arduino IDE. By making minor modifications to the code, you can change the open duration to your desired value. For instance, if you wish to have the flap open for a different duration, you can simply update the code accordingly.
Code
#include
Servo servo; // Create a servo object
int trigPin = 5; // Define the trigger pin for the ultrasonic sensor
int echoPin = 6; // Define the echo pin for the ultrasonic sensor
int servoPin = 7; // Define the pin for controlling the servo motor
int led = 10; // Define an LED pin for reference
long duration, dist, average; // Variables for distance measurements
long aver[3]; // Array for averaging
void setup() {
Serial.begin(9600);
servo.attach(servoPin); // Attach the servo to its pin
pinMode(trigPin, OUTPUT); // Set trigger pin as an output
pinMode(echoPin, INPUT); // Set echo pin as an input
servo.write(0); // Close cap on power on
delay(100);
servo.detach();
pinMode(led, OUTPUT); // Set the LED pin as an output
}
void measure() {
digitalWrite(led, HIGH); // Turn on the LED as an indicator
digitalWrite(trigPin, LOW); // Set the trigger pin low
delayMicroseconds(5); // Short delay
digitalWrite(trigPin, HIGH); // Set the trigger pin high
delayMicroseconds(15); // Short delay
digitalWrite(trigPin, LOW); // Set the trigger pin low again
pinMode(echoPin, INPUT); // Set echo pin as an input
duration = pulseIn(echoPin, HIGH); // Measure the pulse duration
dist = (duration / 2) / 29.1; // Calculate the distance
}
void loop() {
for (int i = 0; i <= 2; i++) { // Take three distance measurements for averaging
measure();
aver[i] = dist;
delay(10); // Delay between measurements
}
dist = (aver[0] + aver[1] + aver[2]) / 3; // Calculate the average distance
if (dist < 50) { // Change distance threshold as per your need
servo.attach(servoPin); // Attach the servo
delay(1);
servo.write(0); // Open the flap
delay(3000); // Keep the flap open for 3 seconds
servo.write(150); // Close the flap
delay(1000); // Additional delay for flap closure
servo.detach(); // Detach the servo
}
Serial.print(dist);
}