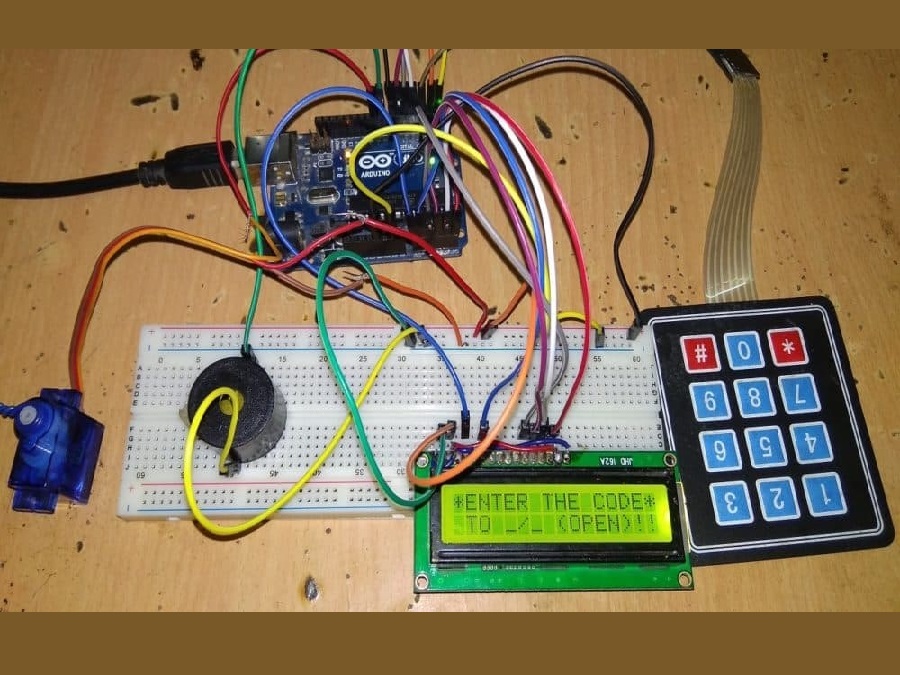
Password based door locking system
Introduction
To design a circuit which checks the password entered by the user and opens the door accordingly
Components
Before you start building your Arduino-based drone, make sure you have the following components:
Arduino UNO
4*4 keypad
Power supply
16 x 2 LCD Display
Servo motor
5K Ohm Resistor
Connecting wires
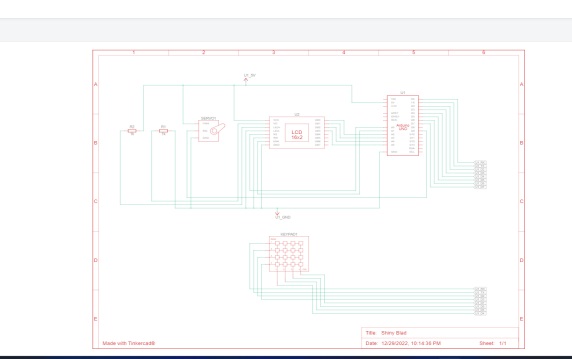
Circuit diagram
A 4 by 4 keypad which is connected to the board through the D0-D7 pins, A16*2 lcd display(A0,A1,A2,A3,A4,A5) and a servo motor attached to d9, when the password is entered through the keypad it checks whether it matches or not , if correct the servo rotates by 180
Code
#include
#include
#include
Servo myservo;
int os=0; // LCD Connections
LiquidCrystal lcd(A0,A1,A2,A3,A4,A5);
const byte row=4;
const byte col=3;
char key[row][col]={
{'1','2','3'},
{'4','5','6'},
{'7','8','9'},
{'*','0','#'}
};
byte rowPins[row]={1,2,3,4};
byte colPins[col]={5,6,7};
Keypad keypad= Keypad(makeKeymap(key),rowPins,colPins,row,col);
char* password="4567";
int cp=0;
int redled=10;
int greenled=11;
int buzz=8;
int invalidcount=12;
void setup()
{
displayscreen();
Serial.begin(9600);
pinMode(redled, OUTPUT);
pinMode(greenled, OUTPUT);
pinMode(buzz, OUTPUT);
myservo.attach(9); //SERVO ATTACHED//
lcd.begin(16,2);
}
void loop()
{
if( cp==0)
{
displayscreen();
}
int l ;
char code=keypad.getKey();
if(code!=NO_KEY)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.print("PASSWORD:");
lcd.print(" ");
lcd.setCursor(7,1);
for(l=0;l<=cp;++l)
{
lcd.print("*");
keypress();
}
if (code==password[cp])
{
++cp;
if(cp==4)
{
unlockdoor();
cp=0;
}
}
else
{
++invalidcount;
incorrect();
cp=0;
}
if(invalidcount==5)
{
++invalidcount;
torture1();
}
if(invalidcount==8)
{
torture2();
}
}
// LOOP ENDS!!!//
}
//********OPEN THE DOOR FUNCTION!!!!***********//
void unlockdoor()
{
delay(900);
lcd.setCursor(0,0);
lcd.setCursor(0,0);
lcd.println(" ");
lcd.setCursor(1,0);
lcd.print("Access Granted");
lcd.setCursor(4,1);
lcd.println("WELCOME!!");
lcd.setCursor(15,1);
lcd.println(" ");
lcd.setCursor(16,1);
lcd.println(" ");
lcd.setCursor(14,1);
lcd.println(" ");
lcd.setCursor(13,1);
lcd.println(" ");
unlockbuzz();
for(os = 180; os>=0; os-=5) // goes from 180 degrees to 0 degrees
{
myservo.write(os); // tell servo to go to position in variable 'pos'
delay(5); // waits 15ms for the servo to reach the position
}
delay(2000);
delay(1000);
counterbeep();
delay(1000);
for(os = 0; os <= 180; os +=5) // goes from 0 degrees to 180 degrees
{ // in steps of 1 degree
myservo.write(os); // tell servo to go to position in variable 'pos'
delay(15);
cp=0;
lcd.clear();
displayscreen();
}
}
//************WRONG CODE FUNCTION********//
void incorrect()
{
delay(500);
lcd.clear();
lcd.setCursor(1,0);
lcd.print("CODE");
lcd.setCursor(6,0);
lcd.print("INCORRECT");
lcd.setCursor(15,1);
lcd.println(" ");
lcd.setCursor(4,1);
lcd.println("GET AWAY!!!");
lcd.setCursor(13,1);
lcd.println(" ");
Serial.println("CODE INCORRECT YOU ARE UNAUTHORIZED");
digitalWrite(redled, HIGH);
digitalWrite(buzz, HIGH);
delay(3000);
lcd.clear();
digitalWrite(redled, LOW);
digitalWrite(buzz,LOW);
displayscreen();
}
//************** CLEAR THE SCREEN!!!*************//
void clearscreen()
{
lcd.setCursor(0,0);
lcd.println(" ");
lcd.setCursor(0,1);
lcd.println(" ");
lcd.setCursor(0,2);
lcd.println(" ");
lcd.setCursor(0,3);
lcd.println(" ");
}
//**************KEYPRESS********************//
void keypress()
{
digitalWrite(buzz, HIGH);
delay(50);
digitalWrite(buzz, LOW);
}
//********DISPALAY FUNCTION!!!*************//
void displayscreen()
{
lcd.setCursor(0,0);
lcd.println("*ENTER THE CODE*");
lcd.setCursor(1 ,1);
lcd.println("TO _/_ (OPEN)!!");
}
//*************** ARM SERVO***********//
void armservo()
{
for (os=180;os<=180;os+=50)
{
myservo.write(os);
delay(5);
}
delay(5000);
for(os=180;os>=0;os-=50)
{
myservo.write(os);
}
}
//**********UNLOCK BUZZ*************//
void unlockbuzz()
{
digitalWrite(buzz, HIGH);
delay(80);
digitalWrite(buzz, LOW);
delay(80);
digitalWrite(buzz, HIGH);
delay(80);
digitalWrite(buzz, LOW);
delay(200);
digitalWrite(buzz, HIGH);
delay(80);
digitalWrite(buzz, LOW);
delay(80);
digitalWrite(buzz, HIGH);
delay(80);
digitalWrite(buzz, LOW);
delay(80);
}
//**********COUNTER BEEP**********//
void counterbeep()
{
delay(1200);
lcd.clear();
digitalWrite(buzz, HIGH);
lcd.setCursor(2,15);
lcd.println(" ");
lcd.setCursor(2,14);
lcd.println(" ");
lcd.setCursor(2,0);
delay(200);
lcd.println("GET IN WITHIN:::");
lcd.setCursor(4,1);
lcd.print("5");
delay(200);
lcd.clear();
lcd.setCursor(2,0);
lcd.println("GET IN WITHIN:");
digitalWrite(buzz,LOW);
delay(1000);
//2
digitalWrite(buzz, HIGH);
lcd.setCursor(2,0);
lcd.println("GET IN WITHIN:");
lcd.setCursor(4,1); //2
lcd.print("4");
delay(100);
lcd.clear();
lcd.setCursor(2,0);
lcd.println("GET IN WITHIN:");
digitalWrite(buzz,LOW);
delay(1000);
//3
digitalWrite(buzz, HIGH);
lcd.setCursor(2,0);
lcd.println("GET IN WITHIN:");
lcd.setCursor(4,1); //3
lcd.print("3");
delay(100);
lcd.clear();
lcd.setCursor(2,0);
lcd.println("GET IN WITHIN:");
digitalWrite(buzz,LOW);
delay(1000);
//4
digitalWrite(buzz, HIGH);
lcd.setCursor(2,0);
lcd.println("GET IN WITHIN:");
lcd.setCursor(4,1); //4
lcd.print("2");
delay(100);
lcd.clear();
lcd.setCursor(2,0);
lcd.println("GET IN WITHIN:");
digitalWrite(buzz,LOW);
delay(1000);
//
digitalWrite(buzz, HIGH);
lcd.setCursor(4,1);
lcd.print("1");
delay(100);
lcd.clear();
lcd.setCursor(2,0);
lcd.println("GET IN WITHIN::");
digitalWrite(buzz,LOW);
delay(1000);
//5
digitalWrite(buzz, HIGH);
delay(40);
digitalWrite(buzz,LOW);
delay(40);
digitalWrite(buzz, HIGH);
delay(40);
digitalWrite(buzz,LOW);
delay(40);
digitalWrite(buzz, HIGH);
delay(40);
digitalWrite(buzz,LOW);
delay(40);
digitalWrite(buzz, HIGH);
delay(40);
digitalWrite(buzz,LOW);
lcd.clear();
lcd.setCursor(2,0);
lcd.print("RE-LOCKING");
delay(500);
lcd.setCursor(12,0);
lcd.print(".");
delay(500);
lcd.setCursor(13,0);
lcd.print(".");
delay(500);
lcd.setCursor(14,0);
lcd.print(".");
delay(400);
lcd.clear();
lcd.setCursor(4,0);
lcd.print("LOCKED!");
delay(440);
}
//*********TORTURE1***********//
void torture1()
{
delay(1000);
lcd.clear();
lcd.setCursor(2,0);
lcd.print("WAIT FOR ");
lcd.setCursor(5,1);
lcd.print("15 SECONDS");
digitalWrite(buzz, HIGH);
delay(15000);
digitalWrite(buzz, LOW);
lcd.clear();
lcd.setCursor(2,0);
lcd.print("LOL..");
lcd.setCursor(1,1);
lcd.print(" HOW WAS THAT??");
delay(3500);
lcd.clear();
}
//*****TORTURE2*****//
void torture2()
{
delay(1000);
lcd.setCursor(1,0);
lcd.print(" ");
lcd.setCursor(2,0);
lcd.print("EAR DRUMS ARE");
lcd.setCursor(0,1);
lcd.print(" PRECIOUS!! ");
delay(1500);
lcd.clear();
lcd.setCursor(1,0);
lcd.print(" WAIT FOR");
lcd.setCursor(4,1);
lcd.print(" 1 MINUTE");
digitalWrite(buzz, HIGH);
delay(55000);
counterbeep();
lcd.clear();
digitalWrite(buzz, LOW);
lcd.setCursor(2,0);
lcd.print("WANT ME TO");
lcd.setCursor(1,1);
lcd.print("REDICULE MORE??");
delay(2500);
lcd.clear();
lcd.setCursor(2,0);
lcd.print("Ha Ha Ha Ha");
delay(1700);
lcd.clear();
}